Aca les dejo un video del Arm en funcionamiento.
jueves, 14 de agosto de 2008
miércoles, 16 de julio de 2008
Protitipo Logochip Arm V 2.0
Pues, bien, en estos dias me he puesto a realizar un nuevo Logochip Arm, hasta el momento funciona bastante bien, deseo implementar algun mecanismo de reconocimiento.
Aca, utilize tres motores, tres sensores, dos sensor de tacto para controlar limites de movimiento y el sensor de rotacion para determinar los 180 grados de giro.
El robot posee una secuencia automatizada para tomar objetos, lo que mas me gusta es el diseño del brazo, que utiliza un engrane de 40 pines fijo y un tren de engranes que gira alrededor de el.
Espero colocar el video pronto.

Aca, utilize tres motores, tres sensores, dos sensor de tacto para controlar limites de movimiento y el sensor de rotacion para determinar los 180 grados de giro.
El robot posee una secuencia automatizada para tomar objetos, lo que mas me gusta es el diseño del brazo, que utiliza un engrane de 40 pines fijo y un tren de engranes que gira alrededor de el.
Espero colocar el video pronto.

martes, 8 de julio de 2008
Logochip Pcb Primera etapa.
 Logochip
LogochipDe nuevo por aca, esta vez para presentarles el diseño de mi pequeña placa de circuito impreso para Logochip, pues aun continuaba usando la protoboard, y decidi que era mejor montarlo en una PCB.
Bien esta es una primera etapa, aqui estan dos imagenes del circuito. Los diseñe en PCBwizard y Livewire, que son unos programas para hacer placas de circuitos, diseñar y probar circuitos electronicos.
 Aun lo continuo mejorando, pero el diseño esta quedando bastante bien.
Aun lo continuo mejorando, pero el diseño esta quedando bastante bien.Sin no saben como hacer un circuito impreso, en pocos dias estare detallando como se hacen artezanalmente.
miércoles, 23 de abril de 2008
PumperBot
 Hola este es uno de los proyectos que por lo general se inician en robotica un carro, este cuenta con dos motores lo que lo hace poder rotar sobre su propio eje.
Hola este es uno de los proyectos que por lo general se inician en robotica un carro, este cuenta con dos motores lo que lo hace poder rotar sobre su propio eje.Lo construi para jugar un rato programando, y realizar algunos proyectos con unos alumnos con los cuales estoy armando robots parecidos.
Este tiene ademas, dos touch sensors, construidos con dos micro switch de mouse viejo, bueno es reciclar :)


Logochip Brick Sorter V 1.0
Bien este es mi cuarto Robot construido en compañia de Logochip como cerebro de mis robots.
La tarea de este Bot es organizar ladrillos de distinto color en sus respectivos compartimentos, esto gracias a la mecanica y muy importante al programa y su algoritmo, pues posee un sensor de luz para leer los colores de los distintos ladrillos, y un sensor de rotacion para saber en cual compartimiento debe de dirigir cada ladrillo.
http://www.youtube.com/watch?v=wf5DjN30hhU
Aca tuve vario desafios, porque no poseeo un sensor de color, me vali del hecho de que podemos calacular un color respecto al rebote de la frecuencia que devuelve un color cuando aplicamos Luz Ir, como se hace con los sensores Lego.
Logochip Line Following V 1.0
Bien este es un pequeño bot, el cual utiliza Logochip para seguir lineas negras, o bien dicho el filo entre el color negro y blanco.
http://www.youtube.com/watch?v=el7NTdYukU4
Utiliza mi sensor de luz, que es relativamnte facil de construir, pues consta de un led y un pequeño fototransistor el cual envia la luz reflejado por cada color, esto despues se asocia a una subrutina que hara que el robot ejecute lo deseado.
Biped Logochip V 2.0
Bien este es mi segundo Bipedo construido con Logochip, verdaderamnete me esforce bastante
en crearlo. Se basa en el estilo de Joe Nagata, este robot puede caminar adelante, atras, y dar vuelta.
http://www.youtube.com/watch?v=oR8_9WsbcWc
Lo interezante de este es el balance que se produce en los pies, me empeñe en estudiar como Joe Nagata diseño sus bipedos y trate de lograr construir uno en base a sus fotografias y explicacion del mecanismo, en cuanto al programa, podemos hacerlo de varias formas, podemos utilizar sincronizacion o utilizar control por sensores de tacto para lograr el control de las piernas.
en crearlo. Se basa en el estilo de Joe Nagata, este robot puede caminar adelante, atras, y dar vuelta.
http://www.youtube.com/watch?v=oR8_9WsbcWc
Lo interezante de este es el balance que se produce en los pies, me empeñe en estudiar como Joe Nagata diseño sus bipedos y trate de lograr construir uno en base a sus fotografias y explicacion del mecanismo, en cuanto al programa, podemos hacerlo de varias formas, podemos utilizar sincronizacion o utilizar control por sensores de tacto para lograr el control de las piernas.
Circuito alternativo para mover motores.
Puente H con LM 386
Cuando pretendemos controlar cargas inductivas con un sistema digital, nos encontramos que no podemos realizarlo directamente. Debemos usar un "driver" o excitador para separar la señal emitida por el sistema digital, del circuito inductivo o de potencia. Para esto se necesita un Puente H que puede armarse de distintas formas. Elegimos este circuito integrado por ser de fácil adquisición y económico, además se evita el trabajo de armar un Puente H con componentes discretos.
Este circuito permite realizar un Puente H para hacer girar motores de CC en ambas direcciones, del tipo de los que se utilizan en juguetes, radio grabadores, lectoras de CDs, etc. Con dos circuitos como este, (4 integrados LM 386) se pueden controlar motores paso a paso de cuatro terminales.
Con "Pin", se hace referencia a la conexión desde las salidas del sistema digital.
En nuestro caso podrian ser 7 portb, y 6 portb.
 El conexionado no es el mismo que se utiliza cuando se emplea el LM 386 como amplificador de audio, esto se hace para lograr un comportamiento casi digital.El funcionamiento es muy simple, poniendo en estado alto uno de los pines de entrada, el motor DC gira en un sentido. Al invertir el estado de los pines de entrada, gira en el otro. Con los dos pines en alto o en bajo simultáneos no gira.
El conexionado no es el mismo que se utiliza cuando se emplea el LM 386 como amplificador de audio, esto se hace para lograr un comportamiento casi digital.El funcionamiento es muy simple, poniendo en estado alto uno de los pines de entrada, el motor DC gira en un sentido. Al invertir el estado de los pines de entrada, gira en el otro. Con los dos pines en alto o en bajo simultáneos no gira.
Este circuito me fue de maravilla, porque tenia unos cuantos Lm386 en casa los cuales hace ya tiempo no utilizaba.
Desde luego, este circuito lo probe y calcule para que sirviese con los motores Lego, ya que exactamente nuestra resistencia de 15 Kilo ohmios nos da la corriente necesaria para activar el Op amp, recordemos nuestro Logochip ofrece salidas TTL (5 voltios).
Exactamente hablando el Motor es el 71427, el cual posee las siguientes caracteristicas:
Motor sin carga, 3.5 mA.
Motor con carga, 360 mA, en 6 N.cm
Algo muy bueno, es que este motor cuenta con una proteccion,un resistor PTC Epcos B1056 y un diodo de uso general, los cuales se encargan de la sobreintensidad de corriente, y el sobre exeso de temperatura, si se levanta la temperatura demasiado, su resistor aumenta y limita la corriente.
http://www.cursoderobotica.com.ar/robotica/inftec/puenteh/
Cuando pretendemos controlar cargas inductivas con un sistema digital, nos encontramos que no podemos realizarlo directamente. Debemos usar un "driver" o excitador para separar la señal emitida por el sistema digital, del circuito inductivo o de potencia. Para esto se necesita un Puente H que puede armarse de distintas formas. Elegimos este circuito integrado por ser de fácil adquisición y económico, además se evita el trabajo de armar un Puente H con componentes discretos.
Este circuito permite realizar un Puente H para hacer girar motores de CC en ambas direcciones, del tipo de los que se utilizan en juguetes, radio grabadores, lectoras de CDs, etc. Con dos circuitos como este, (4 integrados LM 386) se pueden controlar motores paso a paso de cuatro terminales.
Con "Pin", se hace referencia a la conexión desde las salidas del sistema digital.
En nuestro caso podrian ser 7 portb, y 6 portb.
El conexionado no es el mismo que se utiliza cuando se emplea el LM 386 como amplificador de audio, esto se hace para lograr un comportamiento casi digital.El funcionamiento es muy simple, poniendo en estado alto uno de los pines de entrada, el motor DC gira en un sentido. Al invertir el estado de los pines de entrada, gira en el otro. Con los dos pines en alto o en bajo simultáneos no gira.Este circuito me fue de maravilla, porque tenia unos cuantos Lm386 en casa los cuales hace ya tiempo no utilizaba.
Desde luego, este circuito lo probe y calcule para que sirviese con los motores Lego, ya que exactamente nuestra resistencia de 15 Kilo ohmios nos da la corriente necesaria para activar el Op amp, recordemos nuestro Logochip ofrece salidas TTL (5 voltios).
Exactamente hablando el Motor es el 71427, el cual posee las siguientes caracteristicas:
Motor sin carga, 3.5 mA.
Motor con carga, 360 mA, en 6 N.cm
Algo muy bueno, es que este motor cuenta con una proteccion,un resistor PTC Epcos B1056 y un diodo de uso general, los cuales se encargan de la sobreintensidad de corriente, y el sobre exeso de temperatura, si se levanta la temperatura demasiado, su resistor aumenta y limita la corriente.
http://www.cursoderobotica.com.ar/robotica/inftec/puenteh/
Podemos hacer Sonido!!! en el Logochip.
Claro, y es facil.
Construi un pequeño piezo electric Beeper, para darle sonido a mis Robots.

Este es un pequeño código con el que podemos introducir la duración y la nota que deseamos.
to powerup
write portb-ddr 0 ; setea port B a salida
end
to click-on
setbit 0 portb
end
to click-off
clearbit 0 portb
end
to delay :n
repeat :n [no-op]
end
to note :period :duration ; introducir nota,periodo y duracion
repeat :duration [
click-on
delay :period
click-off
delay :period
]
end
to warble :times ; sonido parecido a un telefono
repeat :times [
note 2 200
note 1 200
]
end
Nuevo Rotation Sensor
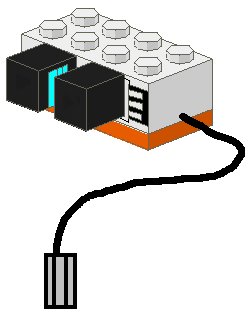
Este sensor de rotación lo diseñe para construir un servo control, lo utilice en mi Brick-Sorter V1.0, necesitaba decirle a un motor moverse tantos pulsos hacia la derecha o la izquierda, aca esta el diagrama que es relativamente fácil de hacer, y cabe en un ladrillo de Lego de 2X4.
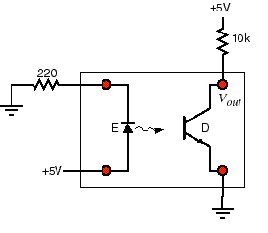
Vout en este caso nos proporcionara los pulsos que necesitamos.
to Rot-sen-A :a
setbit 4 porta-ddr
write portb-ddr 0
setn 0
on-m1
loop [ wait-for-edge
setn n + 1
ifelse (n = :a) [off-m1
setn 0
stop!]
[on-m1]
]
end
to Rot-sen-R :r
setbit 4 porta-ddr
write portb-ddr 0
setn 0
in-m1
loop [ wait-for-edge
setn n + 1
ifelse (n = :r) [off-m1
setn 0
stop!]
[in-m1]
]
end
to wait-for-edge
waituntil [break?]
waituntil [not break?]
end
to break?
output testbit 4 porta
end
to on-m1
setbit 6 portb
clearbit 7 portb
end
to in-m1
setbit 7 portb
clearbit 6 portb
end
to off-m1
clearbit 7 portb
clearbit 6 portb
setn 0
end
Three Touch sensor
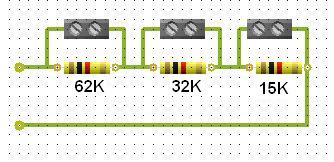
El Three Touch Sensor es realmente un simple convertidor analogico digital.
Este se aprovecha del simple hecho de que el Logochip poseen entradas analogicas que se convierten a un numero de 0=0v a 1023=5v, el Logochip proporciona alimentacion en serie con una resistencia de 10 Kilo ohms , produciendo un divisor de voltage.
El circuito es mostrado abajo.
Son tres resistencias en serie, las entre cada una de ellas posee un conector para las conexiones del interruptor.
Al cerrar un interruptor la corriente se va por el camino mas facil y no pasa por la resistencia, provocando asi un voltaje distinto en el divisor de tension.
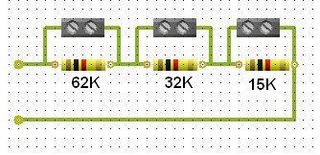
Para el programa solamente deven hacer rangos para cada valor que haga cada interruptor, ademas veamos que poseemos 8 valores distintos.
Este se aprovecha del simple hecho de que el Logochip poseen entradas analogicas que se convierten a un numero de 0=0v a 1023=5v, el Logochip proporciona alimentacion en serie con una resistencia de 10 Kilo ohms , produciendo un divisor de voltage.
El circuito es mostrado abajo.
Son tres resistencias en serie, las entre cada una de ellas posee un conector para las conexiones del interruptor.
Al cerrar un interruptor la corriente se va por el camino mas facil y no pasa por la resistencia, provocando asi un voltaje distinto en el divisor de tension.
Para el programa solamente deven hacer rangos para cada valor que haga cada interruptor, ademas veamos que poseemos 8 valores distintos.
Suscribirse a:
Comentarios (Atom)
-
Aca les dejo un video del Arm en funcionamiento.
-
 Hola este es uno de los proyectos que por lo general se inician en robotica un carro, este cuenta con dos motores lo que lo hace poder rotar...
Hola este es uno de los proyectos que por lo general se inician en robotica un carro, este cuenta con dos motores lo que lo hace poder rotar...