Antes de que iniciemos, podemos empezar por lo básico…¿Qué es el LogoChip?Un LogoChip es básicamente un microcontrolador equipado con un Logo firmware. Es como tener una computadora instalada con un software. Sin el Logo firmware el LogoChip seria solo un integrado en blanco.
¿Pero que es un microcontrolador?
Para comenzar, es un pequeño integrado que puede controlar cosas, por ejemplo luces, motores, relays, displays o dar vida a un Robot, esto llevado a cabo por sí mismo o por una causa externa como lo son sensores.
Digamos entonces que usted desea encender y apagar un Led, o hacerlo por un tiempo determinado, entonces usted sabrá que necesita conectar el Led a una salida.
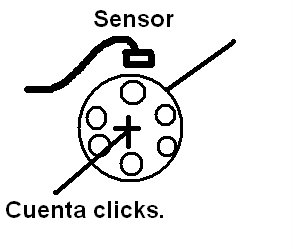
También, si usted quiere que el Led encienda bajo cierto efecto, usted tendra que usar un sensor y desde luego colocado en una entrada.
Basado en esto, sabrá que debe accionar salidas y entradas.
Todo esto es llevado acabo por el LogoChip, primero usted necesita programarlo y luego unir las entradas y salidas a sus dispositivos.
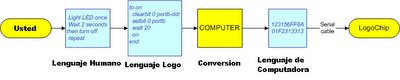
Porqué tengo que conectar mi computadora al LogoChip?La computadora es usada para compilar las instrucciones que usted necesita que el LogoChip lleve a cabo. Esto porque la computadora nos provee una vía para que nosotros como humanos comprendamos el Logo Lenguaje.
Entonces la computadora toma esas instrucciones que nosotros escribimos, y hace que estas se comuniquen con su primo lejano el LogoChip. Esto gracias a que la computadora habla el mismo lenguaje que el LogoChip.
Vean este esquema explica lo que acaba de decir:
El LogoChip viene con un software libre llamado LogoChip Logo. Logo porque este es un lenguaje de programación inventado por el MIT.
Usted utiliza el software para permitir la comunicación entre el LogoChip y la computadora a través de un cable serial.
¿Bien, ahora como yo le enseño al LogoChip?Ahora que usted sabe como comunicarse, hay dos formas de hacer esto:
1. Mecanografiar los comandos directamente en el comand-center de la interfaz LogoChip.
2. Utilizar un redactor externo tal como Bloc de notas y escribir comandos llamados Programas. Entonces descargamos el archivo a su LogoChip usando el software LogoChip.
¿Bien, ahora como yo le enseño al LogoChip?Ahora que usted sabe como comunicarse, hay dos formas de hacer esto:
1. Mecanografiar los comandos directamente en el comand-center de la interfaz LogoChip.
2. Utilizar un redactor externo tal como Bloc de notas y escribir comandos llamados Programas. Entonces descargamos el archivo a su LogoChip usando el software LogoChip.
 Hola este es uno de los proyectos que por lo general se inician en robotica un carro, este cuenta con dos motores lo que lo hace poder rotar sobre su propio eje.
Hola este es uno de los proyectos que por lo general se inician en robotica un carro, este cuenta con dos motores lo que lo hace poder rotar sobre su propio eje.

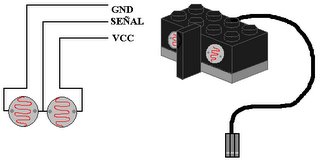
 El conexionado no es el mismo que se utiliza cuando se emplea el LM 386 como amplificador de audio, esto se hace para lograr un comportamiento casi digital.El funcionamiento es muy simple, poniendo en estado alto uno de los pines de entrada, el motor DC gira en un sentido. Al invertir el estado de los pines de entrada, gira en el otro. Con los dos pines en alto o en bajo simultáneos no gira.
El conexionado no es el mismo que se utiliza cuando se emplea el LM 386 como amplificador de audio, esto se hace para lograr un comportamiento casi digital.El funcionamiento es muy simple, poniendo en estado alto uno de los pines de entrada, el motor DC gira en un sentido. Al invertir el estado de los pines de entrada, gira en el otro. Con los dos pines en alto o en bajo simultáneos no gira.